La navigation en Mi-8:
Salut à tous, donc voilà un post pour parler d'un appareil que tout le monde connaît mais que personne ne pilote: le célèbrissime et increvable Mi-8, bête à tout faire de l'armée russe depuis les années 60, imité mais jamais égalé et adoré un peu partout dans le monde.
Et on va tenter ici de dé-mystifier le système de navigation doppler, qui est composé:
- du système de radar doppler à proprement dit, composé d'une antenne émettrice et un antenne réceptrice toutes les deux montées sur la poutre de queue:

Notez qu'on retrouve aussi ce système sur le KA50, à la différence près qu'il est mieux caché

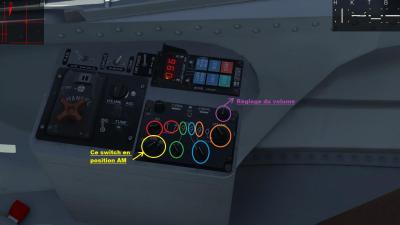
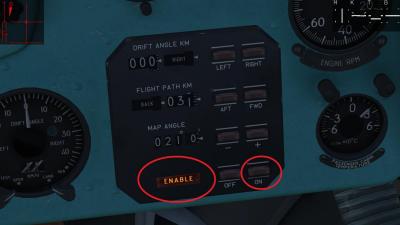
 - du panneau de contrôle du système de navigation (entouré en rouge)
- du panneau de contrôle du système de navigation (entouré en rouge)

C'est grâce à ce panneau que nous entrerons la distance vers le prochain waypoint, le cap vers le prochain waypoint, et nous pourrons aussi "mettre en pause" ou "reprendre" la navigation.
- de l'indicateur de dérive (entouré en vert)

Cet indicateur vous indiquera la dérive (en cas de vent latéral, par exemple) ainsi que votre vitesse sol (en dessous de l'aiguille, fenêtre hachurée sur l'image).
Disons que votre cap magnétique à suivre vers votre prochain waypoint est 150° et que vous subissez un vent latéral soufflant de la droite vers la gauche: par exemple, l'aiguille indique 10° de dérive coté gauche de 'instrument. Dans ce cas, pour arriver sur votre waypoint, vous corrigerez la dérive latérale de 10° vers la droite, et vous suivrez donc un cap de 150°+10=160°, tout simplement.
Le sélecteur land/sea en bas à droite vous permet de sélectionner "land" si vous survolez la terre ferme et "sea" si vous survolez une étendue d'eau, ce afin de corriger la dégradation du signal radar qui vient du fait que la réflection du signal est moindre en survolant l'eau (je suis pas spécialiste en la matière mais c'est mon hypothèse, NA !

.)
Quand au sélecteur en bas à gauche, il vous permet d'effectuer un test de l'instrument.
- de l'indicateur de déplacement longitudinal/latéral (entouré en rouge):

Cet instrument vous indiquera votre vitesse
SOL en mouvement:
- longitudinal (avant/arrière
) jusqu'à 50 km/h
- latéral (vers la gauche ou la droite) jusqu'à 25 km/h
Cet instrument, bien qu'inutile en navigation, vous sera d'une aide précieuse en dessous de 50 km/h (vitesse air insuffisante pour les pitots) et vous sera d'une TRES GRANDE AIDE lors du vol stationnaire et vous indiquera tout déplacement que vous pourrez alors corriger. Noter aussi les graduations sur la partie gauche de l'instrument qui servent de vario.
-des interrupteurs qui permettent la mise en route du sytème doppler, côté copilote, en haut côté droit:

Bon, tout ça c'est bien joli, et vous demanderez "mécommenkonfé ?!". Je vais donc tenter de vous expliquer comment je m'y prends pour naviguer avec ce système high tech sorti de la silicon valley soviétique des années 60. Disons que je veuille partir de Batumi pour me rendre sur l'aérodrome en X près de Kobuleti:
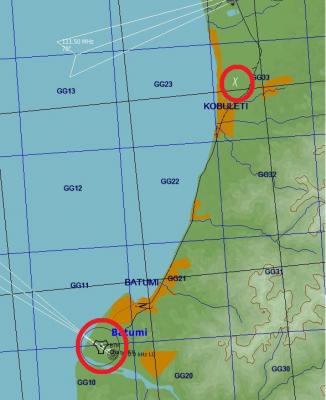
Avant de commencer, fixez vous un point d'initialisation. En effet, la logique consiste à dire au système "à partir de CE point, je veux parcourir TELLE distance sur TEL cap". Ici, je prendrai comme point d'initialisation le croisement entre la piste et la taxiway qui est à mi-piste:

Puis, grâce à la règle de l'éditeur de mission ou de la vue F10, je trace la route entre le point initial et l'aérodrome du X:

Comme vous le voyez, vous devrez parcourir 30.795 km au cap 027°.
ATTENTION, 027° est le cap géographique, la déviation magnétique étant de 6
° dans le Caucase, vous devrez afficher un cap magnétique 027°-6°=021°sur votre HSI
Ensuite, démarrez votre Mi-8, une fois que tous vos systèmes sont parés, vous allez entrer vos paramètres de navgation comme sur l'image suivante:
 -Flight path kilometer
-Flight path kilometer: votre distance à parcourir vers le waypoint (30.8km dans notre exemple). Réglez là avec le bouton aft: ce faisant le système décomptera la distance et vous indiquera la distance restante à parcourir. Affinez avec le bouton fwd si vous indiquez une distance trop grande
-Map angle: le cap magnétique à suivre vers le waypoint (021° pour notre exemple)
-Drift angle km: ON NE TOUCHE A RIEN SUR CETTE LIGNE !!! Les infos sur cette ligne nous donneront plus tard notre écart latéral ar rapport à notre plan de vol
Une fois les paramètres du plan de vol rentrés, réglez l'aiguille de votre HSI sur le cap 021° à suivre grâce à la molette de l'instrument. Faites ceci pour le HSI du pilote ainsi que pour le HSI du copilote:


Une fois les paramètres réglés, décollez, et, en survolant le point initial, appuyez sur la touche du panneau du système de navigation:
A partir de maintenant, le système de navigation est activé et vous indiquera en temps réel la distance restante vers votre waypoint ainsi que votre éventuel écart latéral avec votre plan de vol (ligne du haut).
Une fois le point d'initialisation passé et le système activé, prenez le cap de 021° pour suivre votre plan de vol. Toutes les minutes, jetez un coup d'oeil à votre panneau de contrôle afin de vérifier votre écart latéral éventuel. D'ailleurs, voyons un cas d'écart latéral. Mon HSI et mon panneau indiquent ceci alors que je fais route au 021°:

 Drift angle: environ 2km, left
Drift angle: environ 2km, left Cela signifie que je suis écarté d'environ 2km à gauche de mon plan de vol
Flight path: 25.2km, back Cela signifie que je suis à 25.2km de mon supposé waypoint
***Note:*** en cas d'écart latéral à droite du plan de vol, la ligne drift angle vous affichera une distance, puis "right". Virez dans ce cas à gauche pour rattraper votre plan de vol.
Tout ceci peut être résumé par ce shéma:
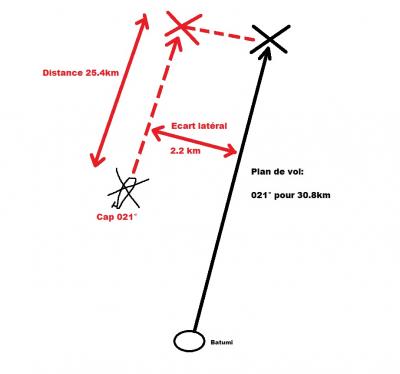
Je devrai donc corriger mon cap afin de rattraper mon plan de vol. Pour ce faire, je vais virer à droite, disons au 060°. Une fois que ma ligne "drift angle" sera pratiquement égale à 0, je virerai par la gauche et reprendrai alors un cap de 021°. Je me retrouverai alors avec, par exemple, les paramètres suivants:


On note un drift angle (donc écart) latéral trèèèèès légèrement à gauche, pour ne pas dire négligeable et un flight path de 22km, ce qui se traduit par le fait que je suis à nouveau pile poil sur mon plan de vol, comme le montre le schéma:
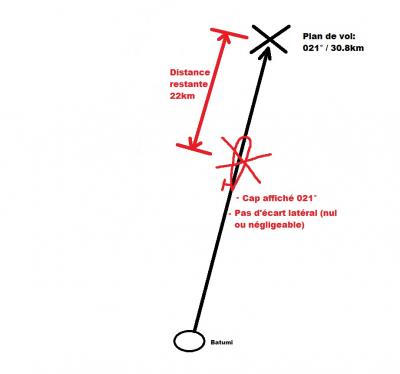
Contrôlez votre écart latéral toutes les minutes, corrigez si nécessaire, et ansi de suite jusqu'à destination.
Si vous suivez un plan de vol qui comprend plusieurs waypoints:
-prenez visuels sur votre waypoint courant 2km avant de l'atteindre. La bienveillance de la personne qui édite la mission (ben oui, j'y crois !

) vous mettra en waypoint des intersections de routes, de rivières, des bases, enfin bref
un truc qui se voit.
-Quand vous avez un visuel, stoppez le système de navigation (bouton "off" tout en bas)
-entrez les nouveaux paramètres de navigation (cap, distance
avec le bouton "aft"), réglez l'aiguille de cap des 2 HSI vers le waypoint suivant
-une fois que vous passerez au dessus du waypoint courant, ré-enclenchez le système de navigation (bouton "on") et poursuivez vers votre prochain waypoint.
Maintenant, voyons 2 cas de figures pour deux types de navigation:
-Avec "aft": Pour naviguer d'un waypoint
VERS un waypoint comme décrit ci-dessus, la distance diminuera au fur et à mesure que vous vous rapprocherez du waypoint. Si vous dépassez le waypoint, l'indication "aft" sur la panneau changera en "forward" et la distance augmentera au fur et à mesure que vous vous éloignerez.
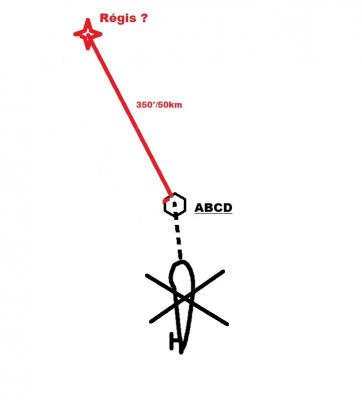
-Pour naviguer A PARTIR d'un point connu (Bullseye, FARP, balise de radio nav, ville etc...) PENDANT UNE CERTAINE DISTANCE SUR UN CAP DONNE pour rejoindre une zone cible, une LZ, etc....
Un exemple: Régis le pilote s'est éjecté, sa dernière position connue est au 350° pour 50km de la balise de radionav "ABCD".
Cette fois ci, vous n'allez pas rentrer de distance sur votre panneau de nav, vous allez juste entrer un cap à suivre de 350°.
Une fois que vous aurez survolé la balise, vous enclenchez le système de nav, et en suivant le plan de vol, la distance augmentera. Quand vous aurez suivi le plan de vol et que le distance affichera "50", vous aurez atteint la position du pilote éjecté.
A noter qu'en suivant votre plan en sens inverse, la distance diminuera jusqu'à que vous atteignez la balise ABCD lors de votre vol de retour.
Le schéma ci dessous vous résumera la situation:
Voilà voilà, en espérant que ça pourra en aider certains
Exercice de navigation 1:
Utilisez le système de navigation pour suivre le plan de vol suivant:
IP-WP1: 26.1km au cap 022° cherchez croisement de 2 routes entre 2 rivières dans la ville de Kobuleti
WP1-WP2: 22.9km au cap 038° cherchez croisement d'une route et d'une voie ferrée sur la rive sud de la rivière dans la ville de Maharadze
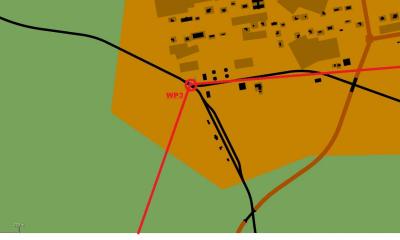
WP2-WP3: 15.3km au cap 259° cherchez aiguillage nord de la gare située à l'ouest de la base de Kobuleti
Après le waypoint 3 retour à Batumi en suivant la côte.
Un fumigène rouge sera mis à feu à chaque waypoint quand vous arriverez à 2.5km de chacun d'entre eux. Vous jugerez ainsi votre éventuelle erreur de navigation.
Bon vol !



















 hélico en vortex copier.jpg 751,79 Ko
7 Nombre de téléchargements
hélico en vortex copier.jpg 751,79 Ko
7 Nombre de téléchargements